四旋翼无人机的动力学模型
本文共 489 字,大约阅读时间需要 1 分钟。
1.四旋翼无人机UAV(unmanned aerial vehicles)简介
四旋翼无人机是一种能够垂直起降的非共轴的多旋翼飞行器,同一对角线上的一组旋翼采用逆时针旋转,另一组旋翼采用顺时针旋转,相互抵消了旋翼旋转带来的反扭矩力,通过调节对称分布的四个旋翼转速,可以不断改变无人机的位置,实现对飞行姿态的控制,比如悬停、俯仰、升降和横滚运动。无人机有4个输入(4个电机),6个输出(上下移动、左右移动和横滚耦合在一起),所以无人机控制系统是一个四输入六输出的欠驱动系统。根据四轴运动方式的不同,可将无人机分为“+”型和“×”型。本次采用“+”型结构,并运用牛顿第二定律及欧拉方程来建立动力学模型。
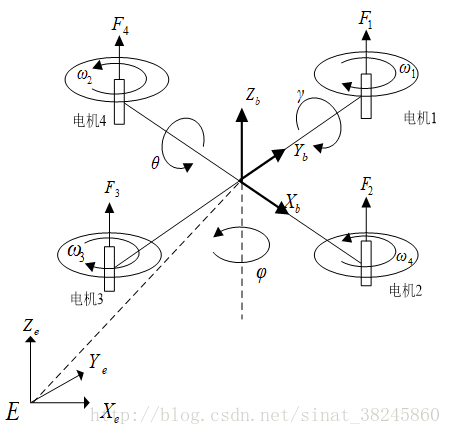
2.导航坐标系E(X e, Y e, Z e )和机体坐标系B(X b ,Y b ,Z b )。
导航坐标系用于研究无人机相对于地面的运动状态,确定机体的空间位置坐标。它忽略地球曲率,即将地球表面假设成一张平面。按选取方法的不同,通常按“东、北、天”或按“北、东、地”为顺序构成右手直角坐标系。
机体坐标系则是固定在无人机上,时刻随着无人机的运动而运动。通常用于研究飞机的转动。
你可能感兴趣的文章
内容里面带标签,在HTML显示问题,JSTL
查看>>
VS编译器运行后闪退,处理方法
查看>>
用div+css做下拉菜单,当鼠标移向2级菜单时,为什么1级菜单的a:hover背景色就不管用了?
查看>>
idea 有时提示找不到类或者符号
查看>>
JS遍历的多种方式
查看>>
ng-class的几种用法
查看>>
node入门demo-Ajax让前端angularjs/jquery与后台node.js交互,技术支持:mysql+html+angularjs/jquery
查看>>
神经网络--单层感知器
查看>>
注册表修改DOS的编码页为utf-8
查看>>
matplotlib.pyplot.plot()参数详解
查看>>
拉格朗日对偶问题详解
查看>>
MFC矩阵运算
查看>>
最小二乘法拟合:原理,python源码,C++源码
查看>>
ubuntu 安装mysql
查看>>
c# 计算器
查看>>
C# 简单的矩阵运算
查看>>
gcc 常用选项详解
查看>>
c++输入文件流ifstream用法详解
查看>>
c++输出文件流ofstream用法详解
查看>>
字符编码:ASCII,Unicode 和 UTF-8
查看>>